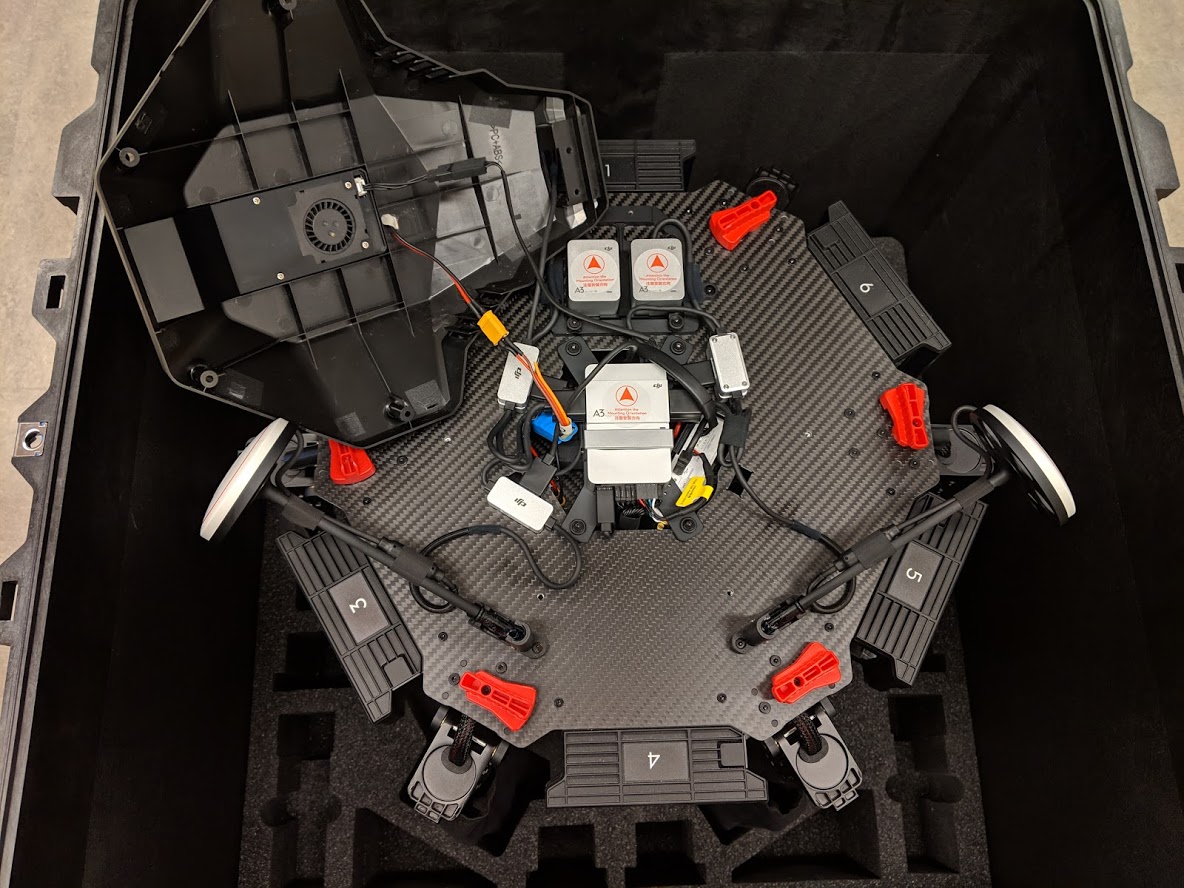
This week I worked on the Matrice 600 for use in our upcoming research project. Since the M600 is designed for a wide array of applications, it by default comes without a camera or sensor platform and even lacks a mounting mechanism for standard DJI gimbals. To install a DJI gimbal, an additional gimbal integration kit is needed to provide the support structure and twist lock mechanism needed to interface with it. The installation of the integration kit went smoothly with only minor difficulties in how the plate should be mounted. Getting the X5 camera gimbal to work was another story.
Since we used an X5 which comes from DJI and is listed as being compatible, I expected everything to work out of the box once it was installed on the airframe. This turned out to be wrong as the controller suddenly refused to bind with the Lightbridge receiver onboard the aircraft. After spending some time troubleshooting the M600 and upgrading and downgrading the firmware, the controller bound up properly but there was no video. It took some more experimentation to figure out that the Lightbridge was attempting to push more data through the wireless link than was actually possible. After reducing the bandwidth settings, the video began to feed through the controller and show live on the screen.
I have my suspicions but my best guess is the indoor environment we were in was causing too much interference by multipathing and nearby wifi devices. I will have to experiment more with the setting in the field to see how it is affected by a more open outdoor environment.